自動座標ケース梱包ライン





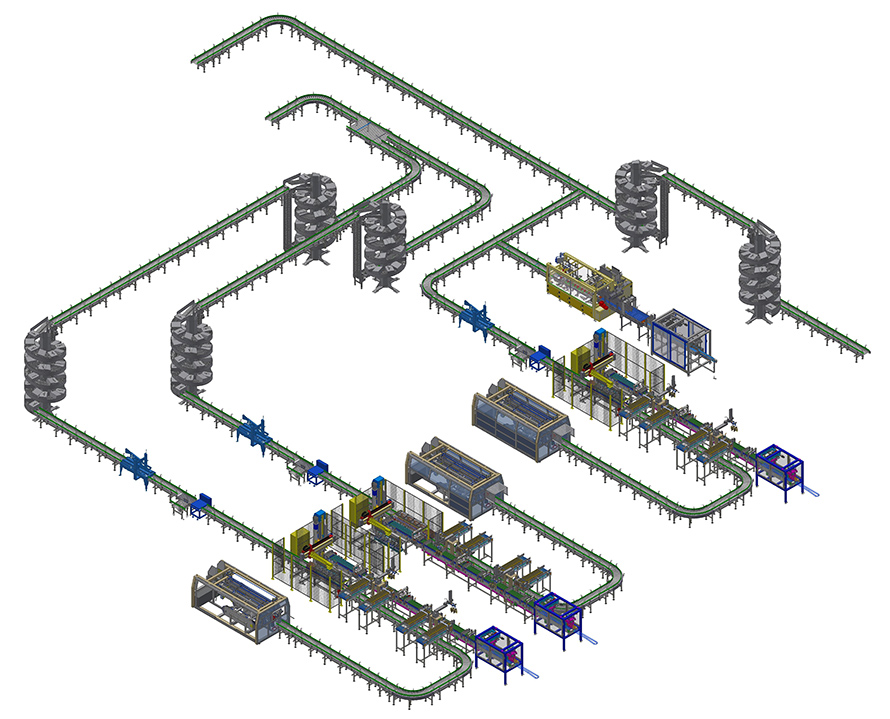
包装生産ラインは、高速仕切り機、製品搬送ライン、掴み搬送ライン、Hbot、二軸移動機構、箱搬送ライン、検出機構、段ボール仕切りグリッパー、段ボール仕切り供給システム、サーボ座標、ボトルグリッパー、防護柵で構成されています。高速仕切り機は製品を複数のレーンに分割し、二軸移動機構は製品の通過を加速します。製品が段ボール仕切りステーションに到着すると、Scarロボットが段ボール仕切りを並べられた製品に積み込みます。製品は仕分けコンベアに到着します。その後、製品はグリッパーでピックアップされ、段ボール箱に入れられ、箱コンベアが製品が入った箱を搬出します。
完全な梱包システムのレイアウト
メイン構成
| ロボットアーム | ABB/KUKA/ファナック |
| モーター | SEW/ノルド/ABB |
| サーボモーター | シーメンス/パナソニック |
| VFD | ダンフォス |
| 光電センサー | 病気 |
| タッチスクリーン | シーメンス |
| 低電圧装置 | シュナイダー |
| ターミナル | フェニックス |
| 空気圧 | フエスト/SMC |
| 吸盤 | ピアブ |
| ベアリング | KF/NSK |
| 真空ポンプ | ピアブ |
| PLC | シーメンス/シュナイダー |
| ヒューマンマシンインターフェース | シーメンス/シュナイダー |
| チェーンプレート/チェーン | イントラロックス/レックスノード/レジーナ |
主な構造の説明




その他のビデオ番組
- 段ボール仕切り付きガラス瓶用サーボ座標ケースパッカー
包装機はどのように操作されますか?製品は一連の自動化された工程を経ます。
搬送生産ラインによる仕分け、回転仕分け、加速バッファ、梱包機、自動シール機構、そして最終的に搬送ラインによる出力という順序立った手順で構成されています。










